Integracja mobilnego systemu wizyjnego do kontroli obecności.
Wymagania:
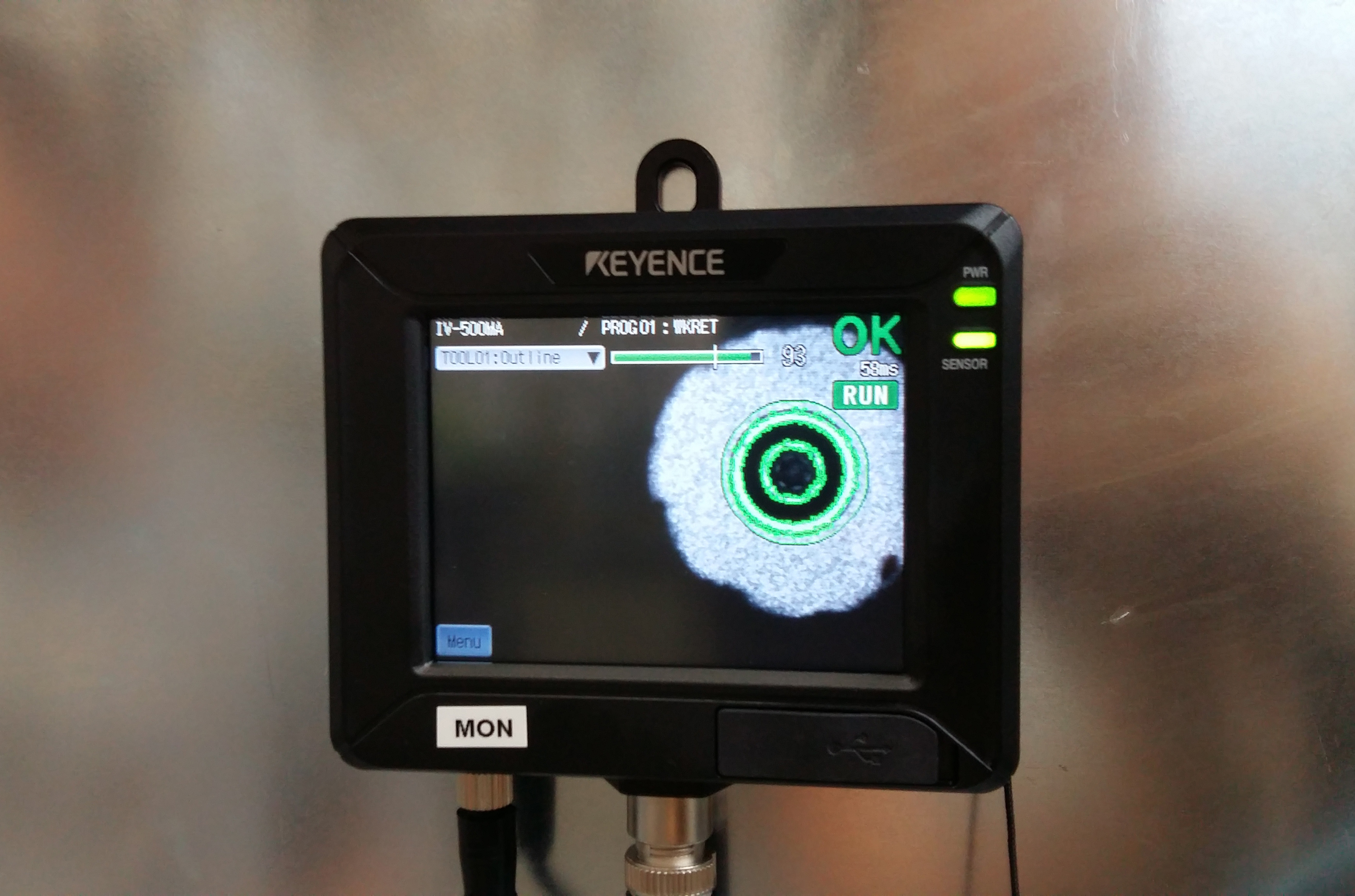
– sprawdzenie obecności śruby montowanej przez operatora
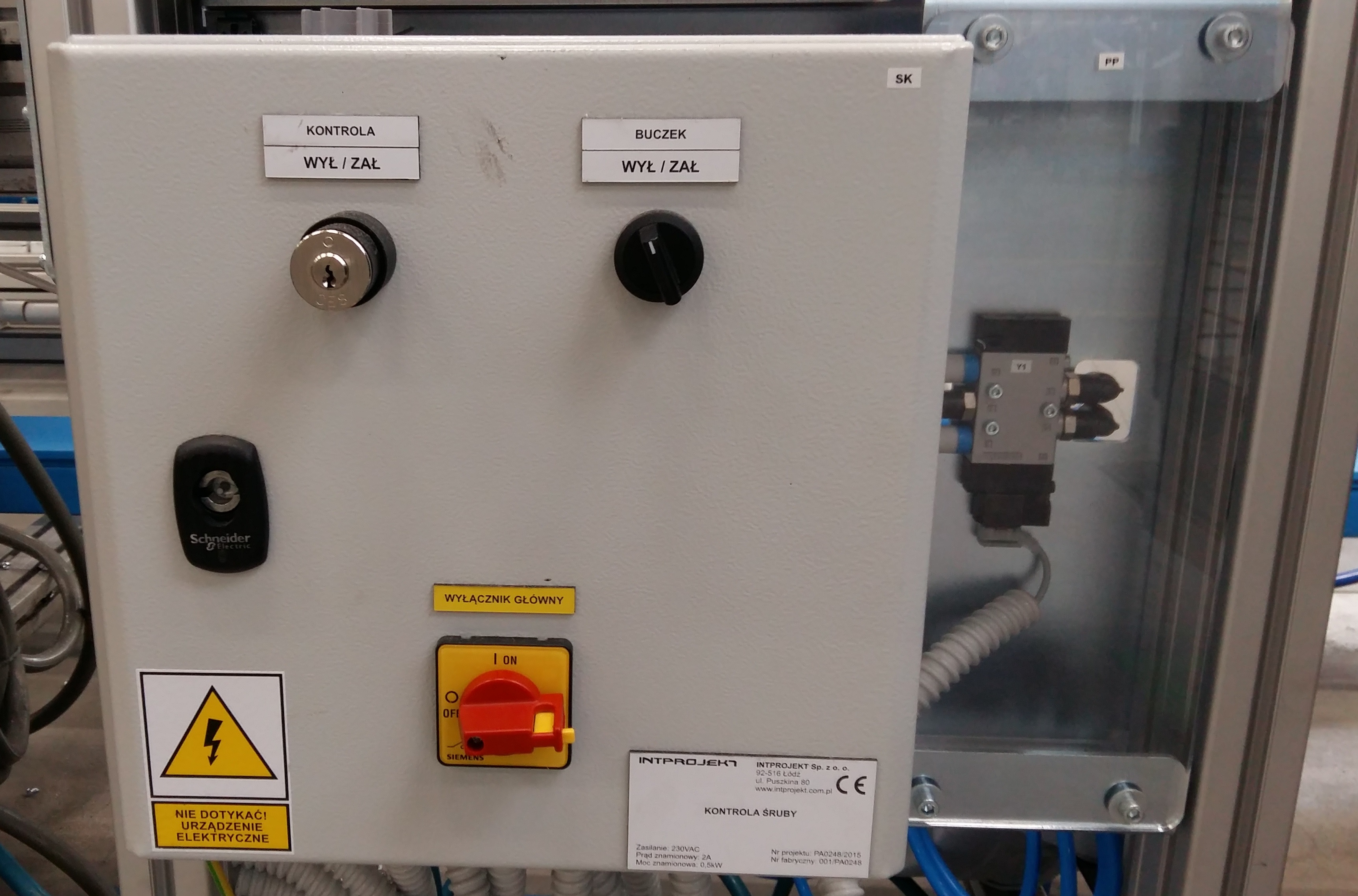
– podgląd wyniku kontroli na panelu
– układ z możliwością zatrzymywania palety na stanowisku
Koncepcja:
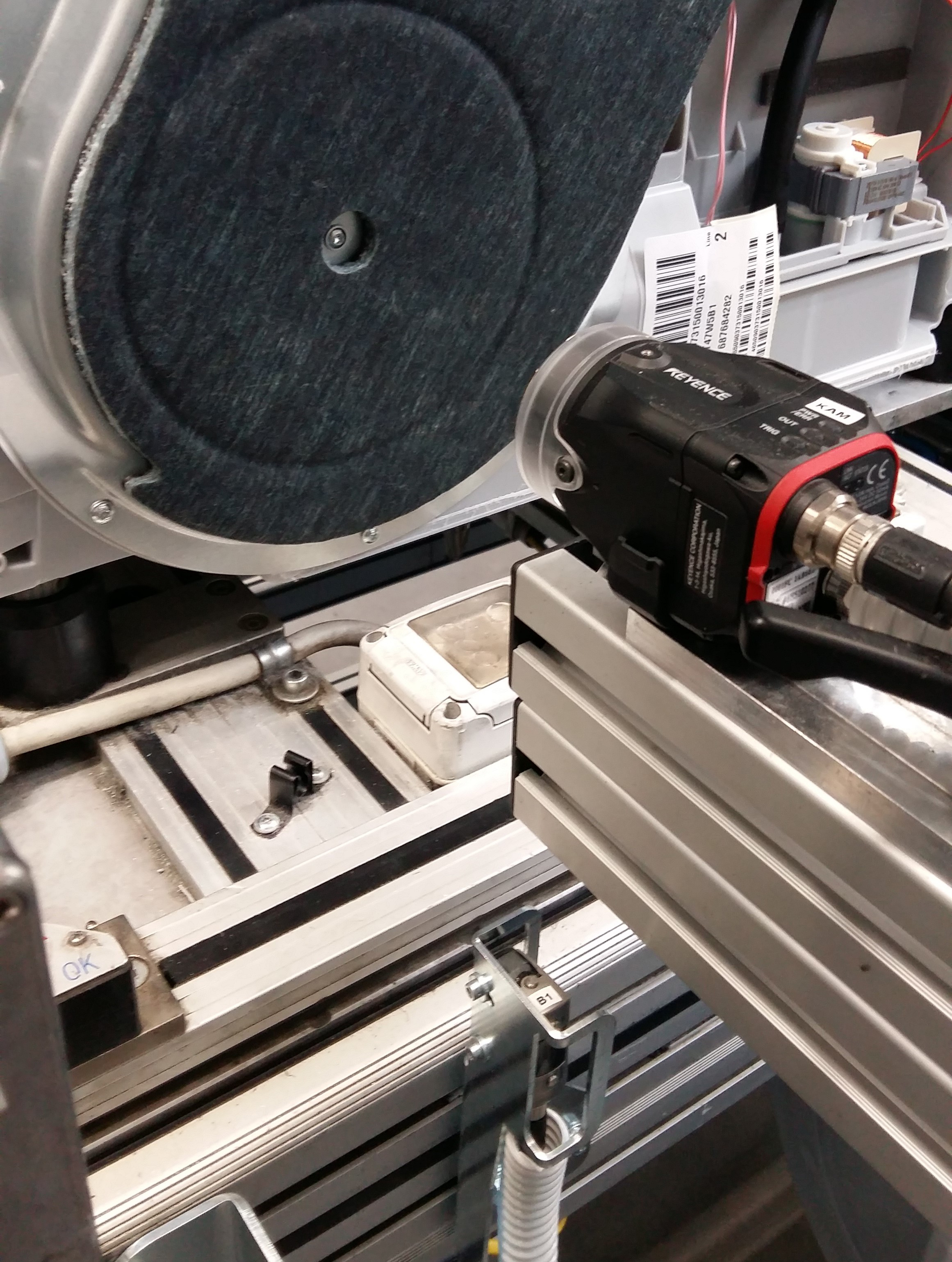
Zasada działania:
Zadziałanie czujnika (TRIGGER) powoduje wyzwolenie czujnika wizyjnego. Wykonane zdjęcie poddane zostaje analizie. W przypadku wykrycia braku obecności śruby, układ pneumatyczny zatrzymuje paletę na stanowisku.
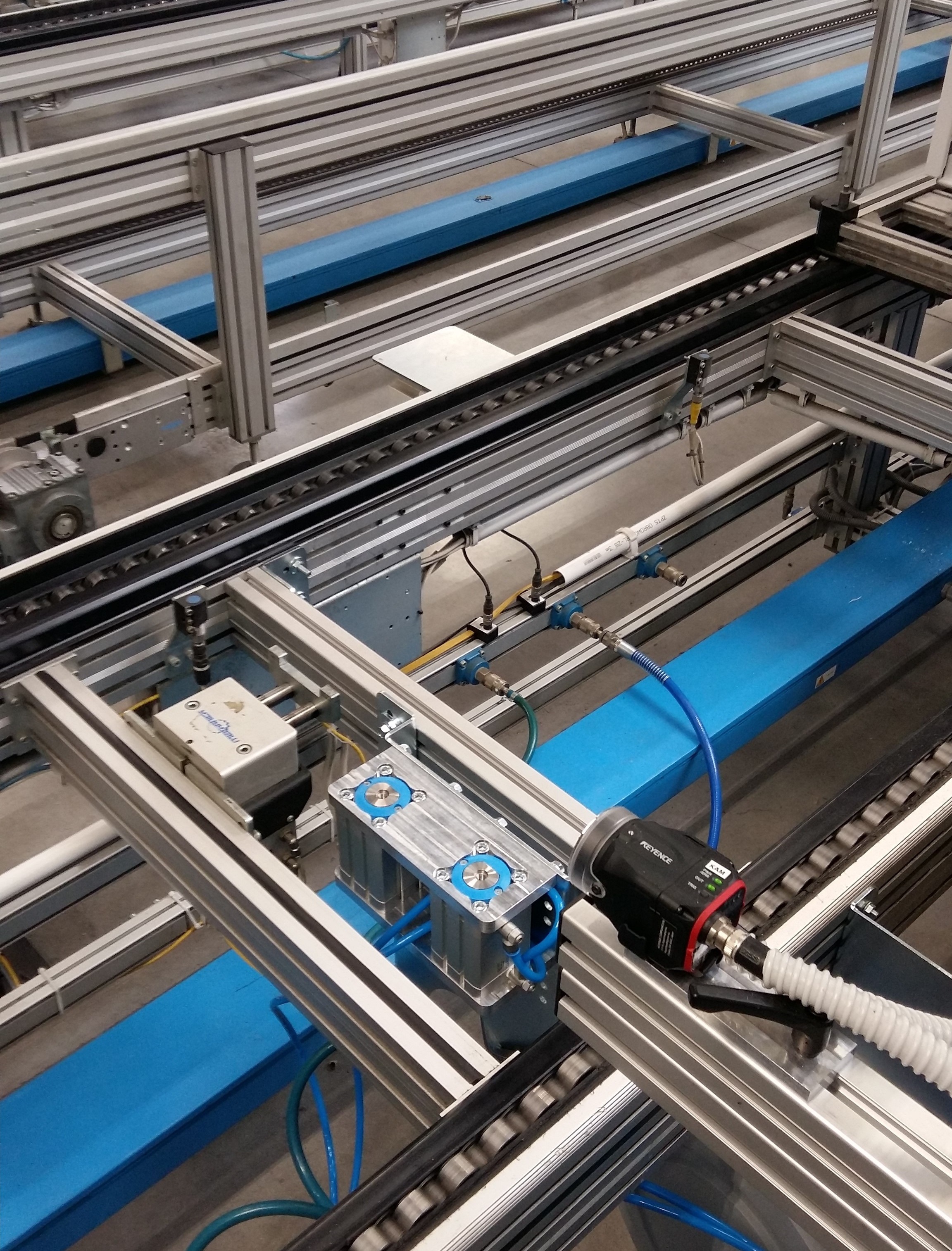
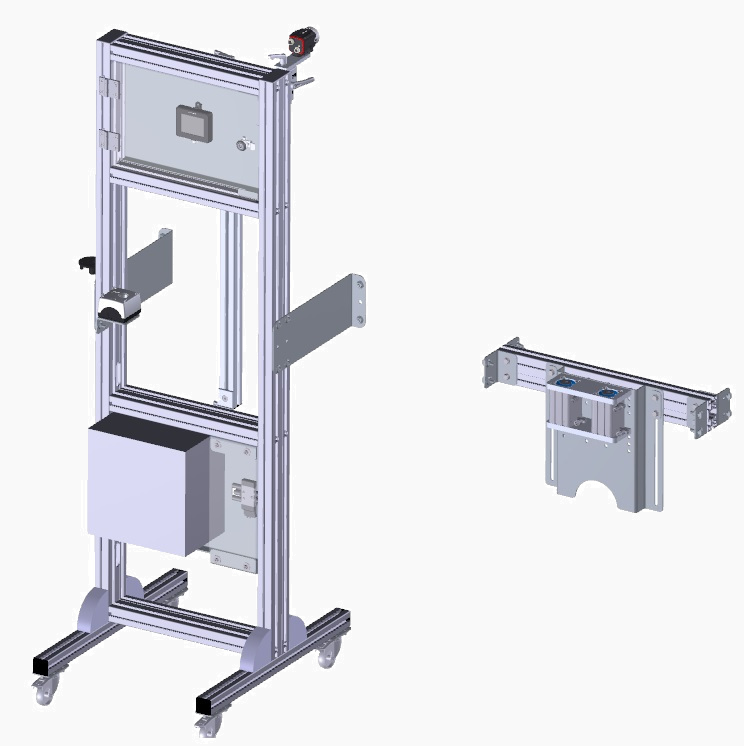
Realizacja:
Mobilność została osiągnięta poprzez doposażenie układu w koła oraz przewodów we wtyczki.
Konstrukcja układu wykonana została z profili aluminiowych. Stabilność systemu wizyjnego zapewniają uchwyty mocujące konstrukcje do przenośnika. Czujnik wizyjny wyposażony został w mocny oświetlacz tak dobrany aby wyeliminować zewnętrzne warunki oświetleniowe.